Trending...
- $620 Million in Recent Government Contract Awards with More Than $1.2 Billion in Annualized Revenue: Circle8 Group (N A S D A Q: CIRC)
- 'Reflections: Enlightening Insights Into the Divine Mystery' — The Latest Book by Philosopher Steven Colborne
- UK Financial Ltd Verifies Maya Preferred PRA Circulating Supply, Proving Its Eight-Year Promise of Under 1M Tokens After Chainlink Labs Agreement




Copperhill Technologies, a provider of embedded systems for CAN Bus development, introduced a new line of small form factor Classical CAN and CAN FD interfaces operating under embedded Linux. The interface boards are based on the popular Raspberry Pi series of CPU modules, and they support programming in Python and C.
GREENFIELD, Mass. - ncarol.com -- Copperhill Technologies offers a great variety of Classical CAN and CAN FD HATs for the Raspberry Pi, which support the development of automotive and industrial applications. The newest members of that product line were designed with a small form factor in mind.
The CANPico module is a carrier board for the Raspberry Pi Pico. The Raspberry Pi Pico is a tiny, fast, and adaptable board built using the RP2040, a dual-core Arm Cortex-M0+ processor with 264KB internal RAM and support for up to 16MB of off-chip Flash.
More on ncarol.com
The CANPico board is soldered onto the Pico, connecting the Raspberry Pi to a CAN Bus controller and transceiver, ready for connection to a CAN Bus network via a simple screw terminal. In addition, the CANPico carries an instrument header with the CAN H and CAN L signals and the digital RX and TX signals for use with an oscilloscope or logic analyzer. Software support is via an open-source MicroPython SDK.
The open-source MicroPython SDK from Canis Labs implements a sophisticated CAN API, including priority-inversion free drivers, 1μs accuracy timestamps, large buffers, and an API for triggering a logic analyzer or oscilloscope. Support for communicating to a host device over USB (via the MIN protocol) enables applications like bus logging or even using a CANPico as a PC CAN interface. The SDK also includes the CANHack toolkit for low-level error injection. The SDK allows Python code to operate on the dual-core RP2040 microcontroller of the Raspberry Pi Pico. It responds in real-time to CAN Bus data traffic with times measured in microseconds rather than milliseconds, making it an excellent platform for hardware-in-the-loop test and emulation.
More on ncarol.com
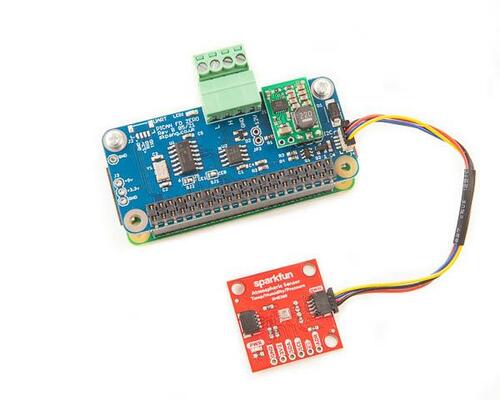
The PiCAN FD Zero HAT provides CAN Bus FD capability for the Raspberry Pi Zero. The Raspberry Pi Zero is a single-board mini-computer, mainly used to design embedded systems for IoT projects. The economical price, small size, and open-source design of this module make it a suitable pick for various applications.
The PiCAN FD Zero HAT uses the Microchip MCP2518FD CAN controller with MCP2562FD CAN transceiver. The CAN_N and CAN_L connection is made via a four-way plug-in terminal block. Also, onboard is a 1A SMPS that supplies power to the PiCAN FD and Pi Zero board.
Both boards, the CANPico and the PiCAN FD Zero HAT, come with extensive documentation, i.e., user manual, schematics, and programming samples.
The CANPico module is a carrier board for the Raspberry Pi Pico. The Raspberry Pi Pico is a tiny, fast, and adaptable board built using the RP2040, a dual-core Arm Cortex-M0+ processor with 264KB internal RAM and support for up to 16MB of off-chip Flash.
More on ncarol.com
- New Research Identifies "The Great Junk Transfer": 49% of Americans Would Rather Inherit Nothing Than Sort Through a Relative's Belongings
- Minus K Technology launches it Educational Giveaway for Universities and Colleges in the USA
- JustCalculators.app Launches Modern, Calculation Platform with Instant Embed Capabilities
- UK Financial Ltd Verifies Maya Preferred PRA Circulating Supply, Proving Its Eight-Year Promise of Under 1M Tokens After Chainlink Labs Agreement
- Anamorphic 3D Only Works on Fixed Screens. Loud! OOH Put It on a Moving Ad Van for Flood Re
The CANPico board is soldered onto the Pico, connecting the Raspberry Pi to a CAN Bus controller and transceiver, ready for connection to a CAN Bus network via a simple screw terminal. In addition, the CANPico carries an instrument header with the CAN H and CAN L signals and the digital RX and TX signals for use with an oscilloscope or logic analyzer. Software support is via an open-source MicroPython SDK.
The open-source MicroPython SDK from Canis Labs implements a sophisticated CAN API, including priority-inversion free drivers, 1μs accuracy timestamps, large buffers, and an API for triggering a logic analyzer or oscilloscope. Support for communicating to a host device over USB (via the MIN protocol) enables applications like bus logging or even using a CANPico as a PC CAN interface. The SDK also includes the CANHack toolkit for low-level error injection. The SDK allows Python code to operate on the dual-core RP2040 microcontroller of the Raspberry Pi Pico. It responds in real-time to CAN Bus data traffic with times measured in microseconds rather than milliseconds, making it an excellent platform for hardware-in-the-loop test and emulation.
More on ncarol.com
- From DJ Booths to Disney: Orlando Author Ryan Tiffin Launches "Chasing Magic"
- FDA Food Recall Notices After Outbreak Linked to 98 Hospitalizations: Practical Tips for Safer Grocery Shopping
- The 'Tax Squeeze': Betsson's Record Quarter Previews the Economics of Finland's 2027 Casino Market
- Ten-Time Combat-Deployed U.S. Army Major Imprisoned For Telling The Truth In North Carolina Court Rm
- ImagineX Acquires Payteros to Strengthen Digital Transformation Capabilities
The PiCAN FD Zero HAT provides CAN Bus FD capability for the Raspberry Pi Zero. The Raspberry Pi Zero is a single-board mini-computer, mainly used to design embedded systems for IoT projects. The economical price, small size, and open-source design of this module make it a suitable pick for various applications.
The PiCAN FD Zero HAT uses the Microchip MCP2518FD CAN controller with MCP2562FD CAN transceiver. The CAN_N and CAN_L connection is made via a four-way plug-in terminal block. Also, onboard is a 1A SMPS that supplies power to the PiCAN FD and Pi Zero board.
Both boards, the CANPico and the PiCAN FD Zero HAT, come with extensive documentation, i.e., user manual, schematics, and programming samples.
Source: Copperhill Technologies Corporation
0 Comments
Latest on ncarol.com
- 'Reflections: Enlightening Insights Into the Divine Mystery' — The Latest Book by Philosopher Steven Colborne
- Scott G. Hoy of Hoy Law Earns 11th Consecutive Super Lawyers Selection
- L2 Aviation Selected for U.S. Air Force KC-46 CASPER Multiple Award Contract
- Leeds Billboard Campaign Drives 188% Traffic Uplift as AI Enquiries Rise 266% for Loud! OOH
- Sister Files Lawsuit Against Georgia Funeral Home for Alleged Mishandling of Brother's Remains
- KeysCaribbean Resorts Offer Savings On Summer Vacations Now Through Aug. 31
- Crossroads4Hope Announces The Lipschutz Women's Fund
- Handmade Coverlet Returns Home to Piedmont Crossing
- AI, Drones, Defense & Explosive Growth: Why ZenaTech Is Emerging as One of the Most Compelling Technology Growth Stories (N A S D A Q: ZENA)
- 91 Per Cent of Enterprises Will Increase AI Spending. Most Can't See the Cost — or the Risk!
- VINCE Lifestyle Magazine Announces Virtual "Health, Wealth & Wellness Summit"
- New ProEssentials v11: Native WinUI Charting Library, 100M Points in 15ms, Following Microsoft's Vision for True Native Swap-Chain Rendering
- Salestrics Releases Version 2.0 to Unify CRM, Business Email, and Operations on a Single Customer Graph
- Inlow Upholstery Offers Custom Boat Seat Reupholstery for Western North Carolina Lake Communities
- Aderra Opens in Magnolia, Texas, Offering a New Model for 62+ Homeownership
- What's New in Hokkaido, Autumn 2026
- Charlotte Investors Name Priority Property Group Among the City's Best Property Management Companies
- Gospel Artist and Media Executive Trevone Perry Heads to the 41st Stellar Gospel Music Awards
- KOLBUS America Welcomes New Sales Manager, Reid Crawley
- CRG Awarded NASA SEWP VI Contracts in Categories B and C